Precise Time Delay Measurement and Compensation …
Jin Huang, Yingqiang Wang*, Haoda Li, Zichen Liu, Zhikun Wang, Ying Chen*
IEEE Transactions on Instrumentation and Measurement / Journal manuscript (2026)
Keywords:
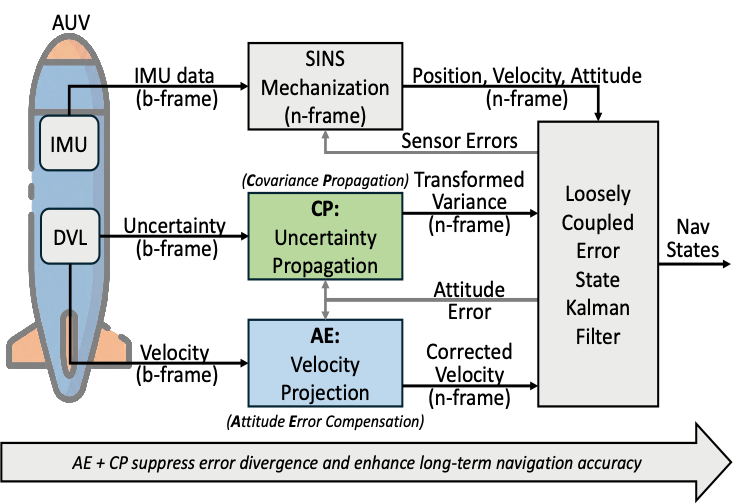
Underwater integrated navigation
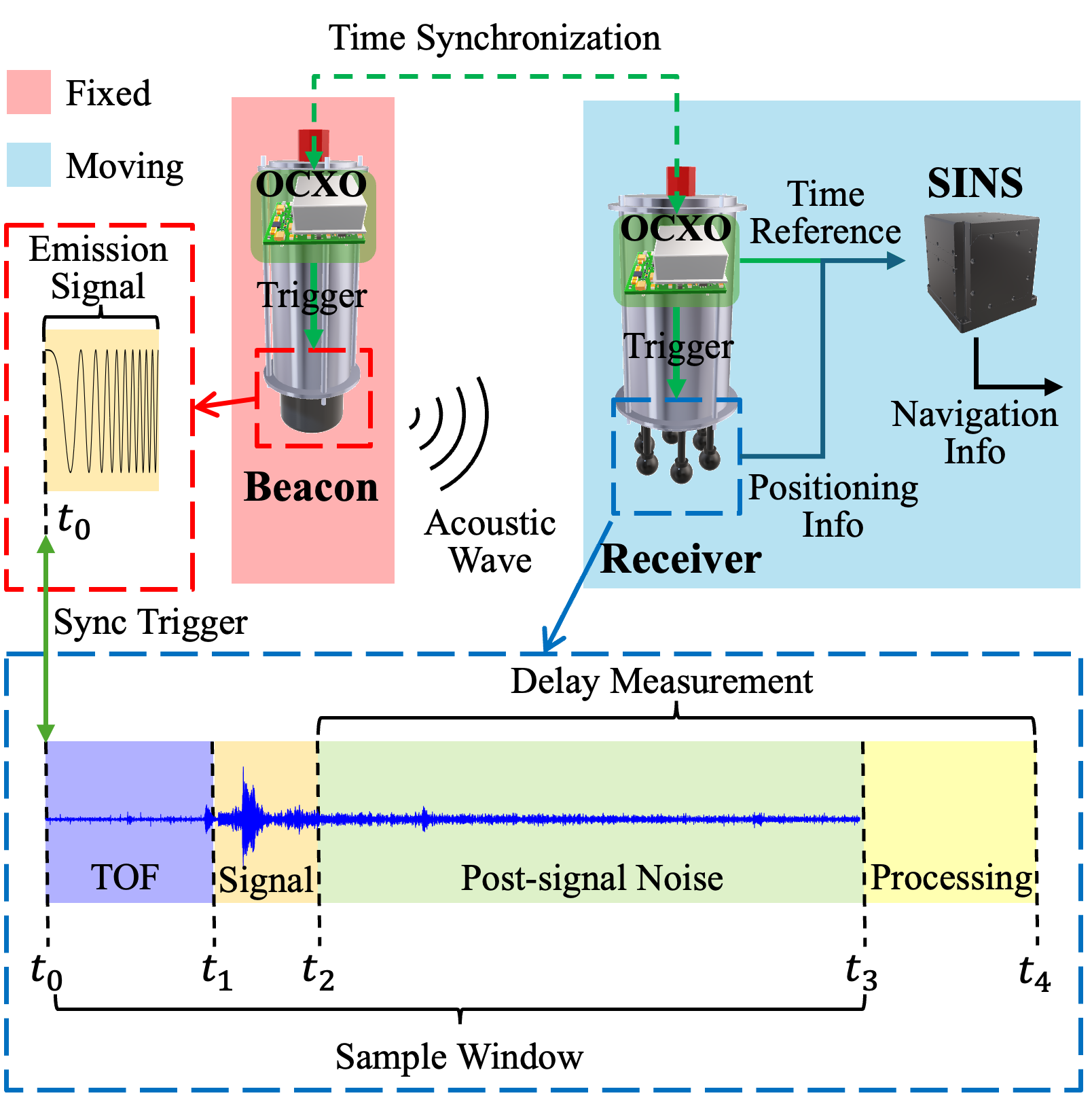
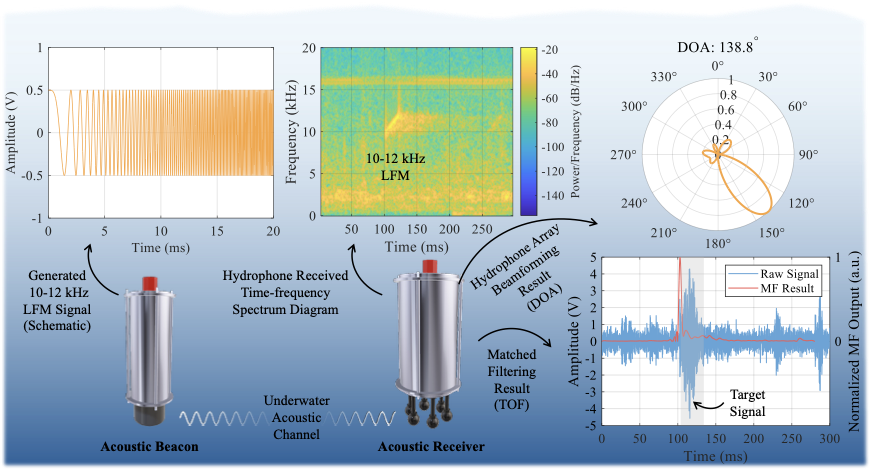
Passive inverted USBL (piUSBL)
Time synchronization
Tightly coupled sensor fusion
Autonomous underwater vehicle