About Me
I am a Ph.D. candidate supervised by Prof. Ying Chen at Zhejiang University.
My research interests include marine robotics, underwater integrated navigation, and acoustic positioning systems.
I have developed several underwater navigation/positioning systems and algorithms, which have been successfully applied in real-world underwater scenarios, and validated through extensive sea trials.
Interests
- Underwater Navigation & Positioning
- Deep integrated Sensor Fusion
- Underwater Acoustic Sensing
News
🎉 Our paper Raspi2USBL: An Open-Source Raspberry Pi-Based Passive Inverted Ultra-Short Baseline Positioning System for Underwater Robotics has been accepted for publication in IEEE Journal of Oceanic Engineering.
2026.06
🎉 Our paper Precise Time Delay Measurement and Compensation for Tightly Coupled Underwater SINS/piUSBL Navigation has been accepted for publication in IEEE Transactions on Instrumentation and Measurement.
2026.03
✈️ Started a research visit at The University of Tokyo, hosted by Prof. Moju Zhao at the DRAGON Lab.
2025.11
🌊 Successfully completed a series of sea trials in Zhoushan for validating an underwater positioning and navigation system.
2025.10
👏 Won an Excellent Poster Award at the 7th National Conference on Marine Technology in Zhoushan, China.
2025.05
Research
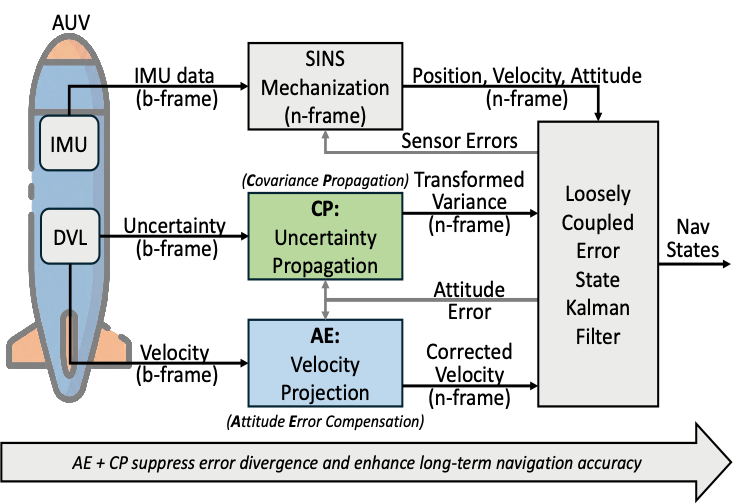
Precise Time Delay Measurement and Compensation …
Jin Huang, Yingqiang Wang*, Haoda Li, Zichen Liu, Zhikun Wang, Ying Chen*
IEEE Transactions on Instrumentation and Measurement / Journal manuscript (2026)
Keywords:
Underwater integrated navigation
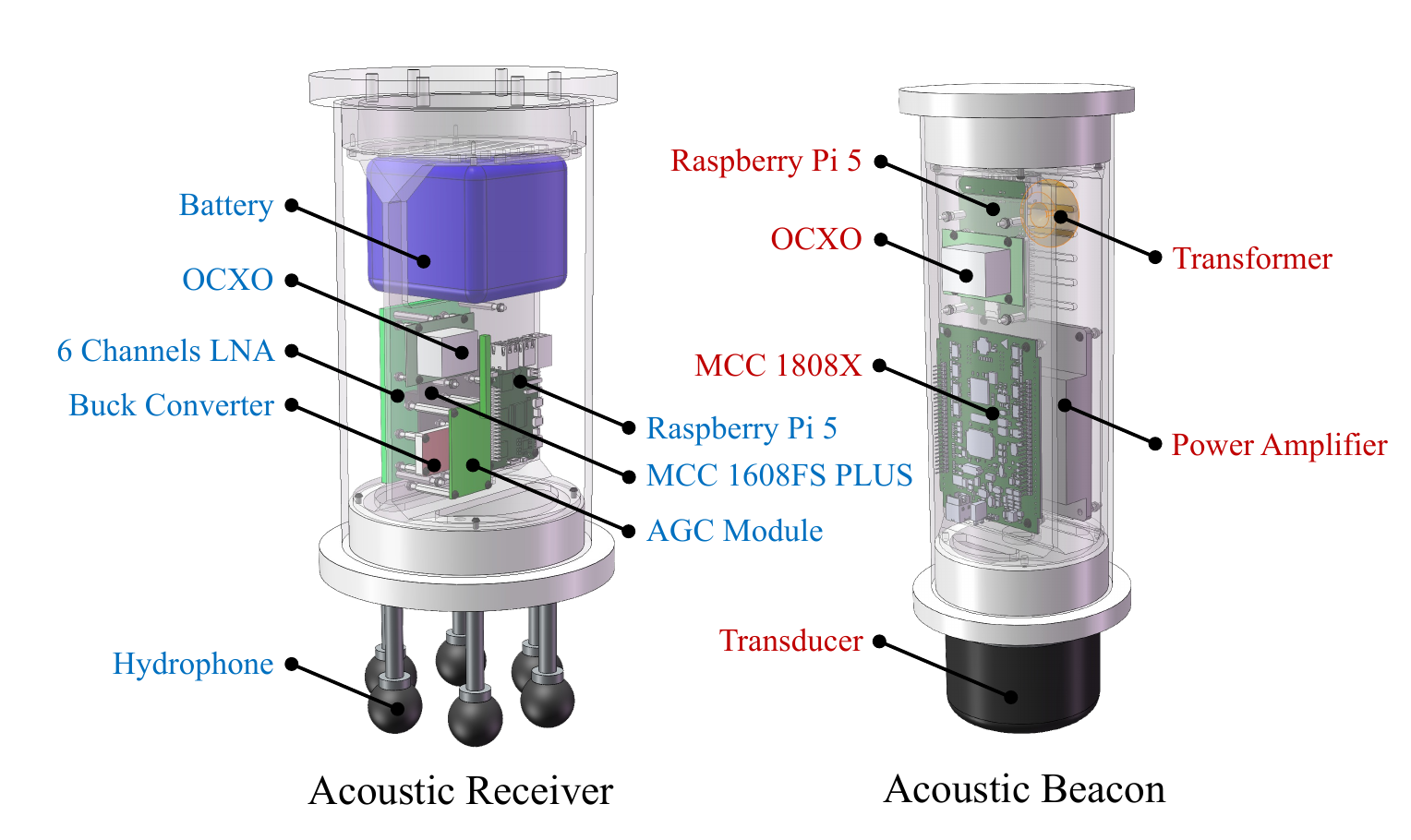
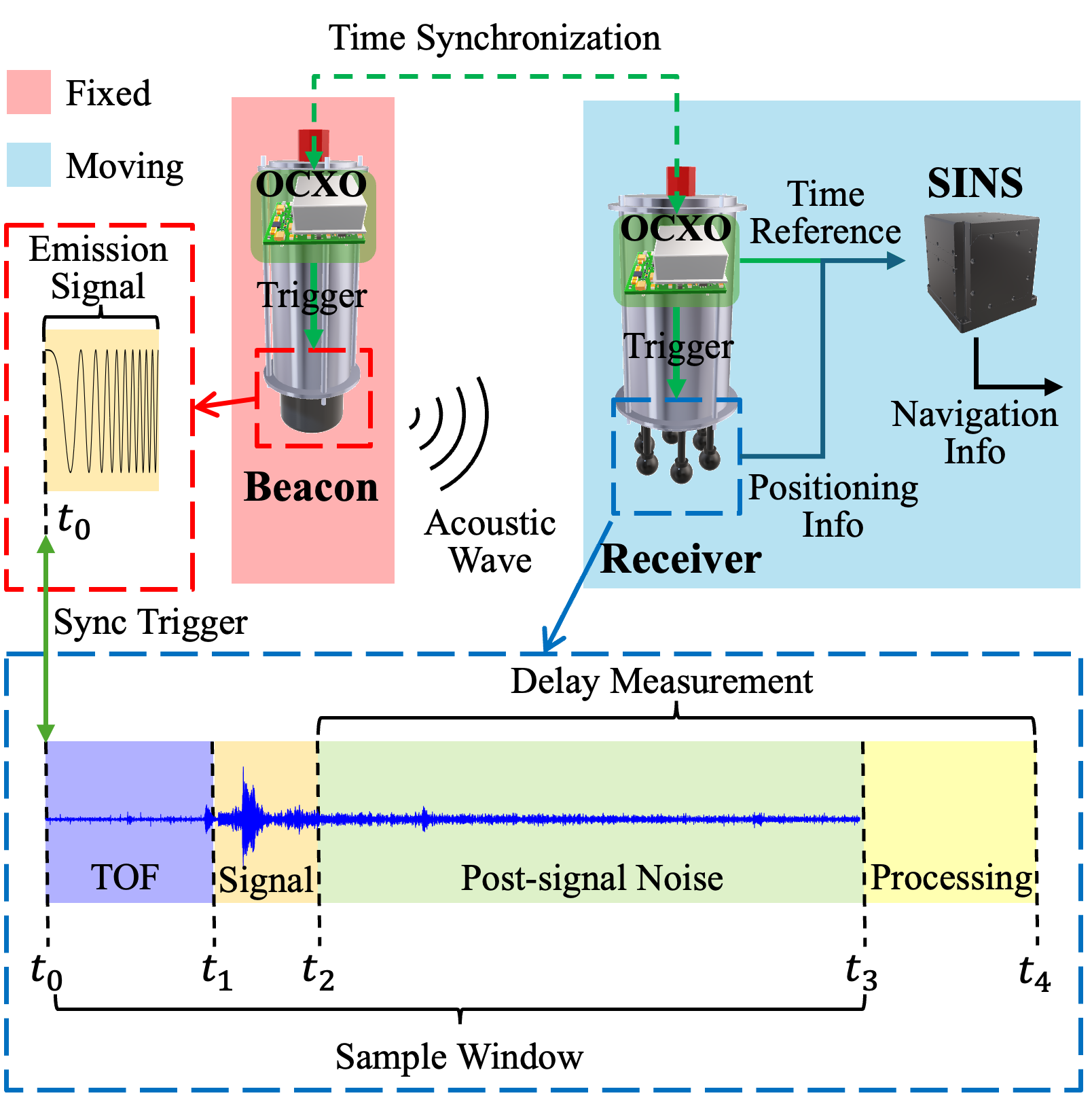
Passive inverted USBL (piUSBL)
Time synchronization
Tightly coupled sensor fusion
Autonomous underwater vehicle