Autonomous Underwater Vehicle
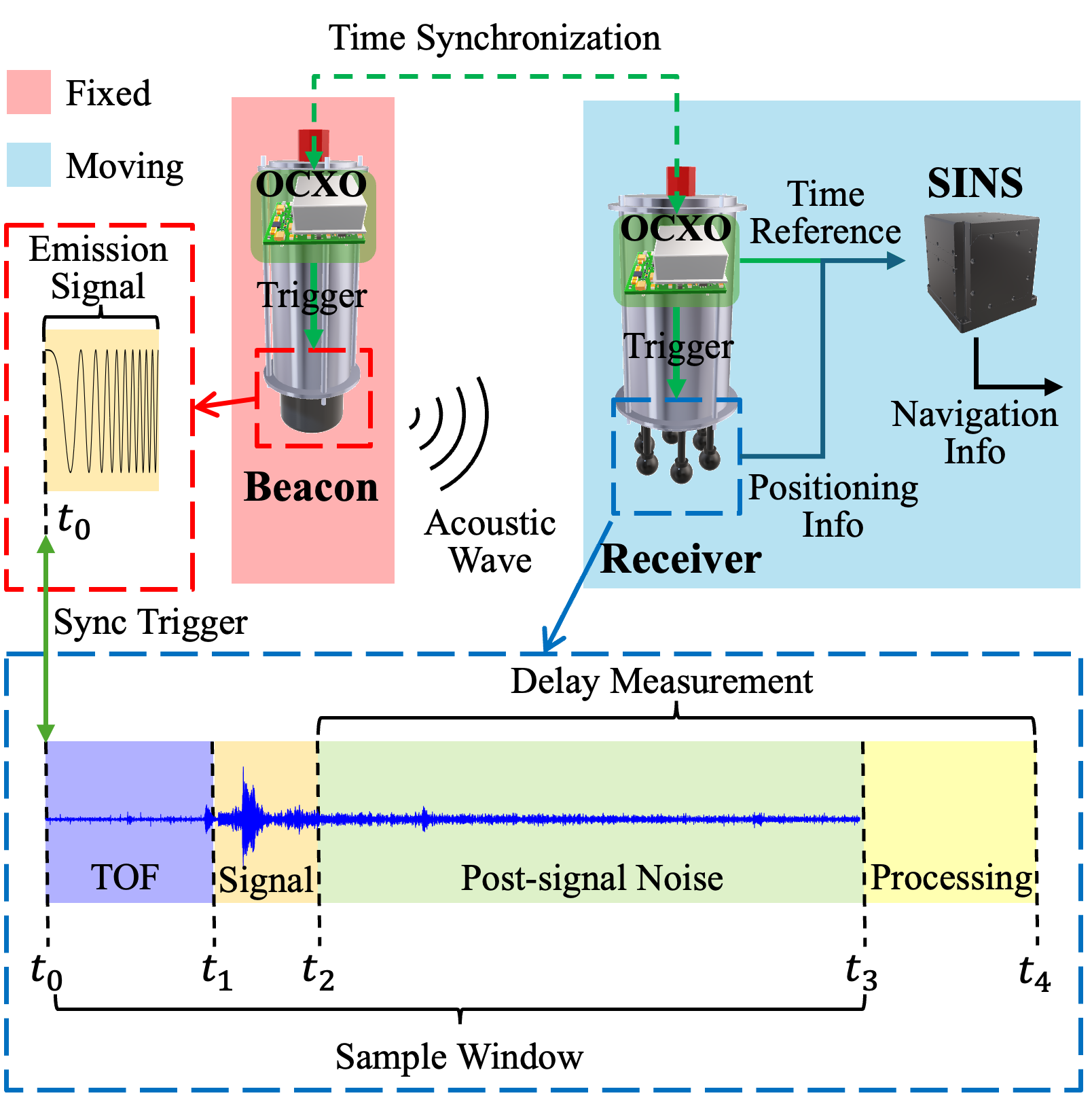
Precise Time Delay …
Research Overview
Time misalignment between acoustic positioning systems and inertial navigation sensors is a critical yet often underappreciated source of error in underwater integrated navigation. This work proposes a tightly coupled SINS/piUSBL/depth gauge navigation framework that explicitly …
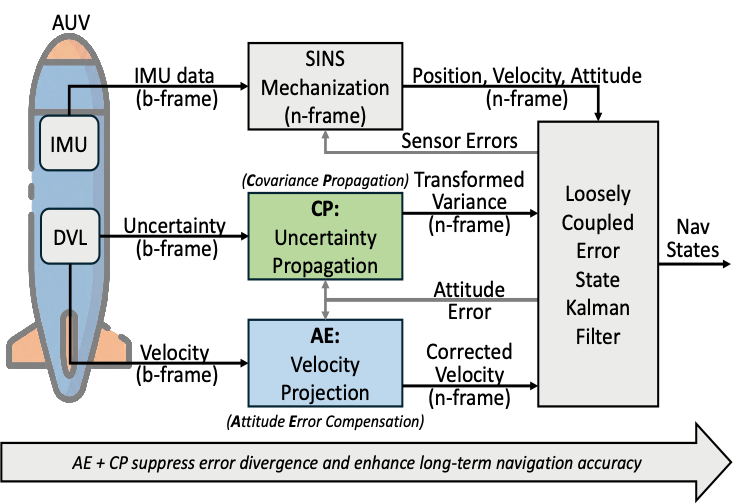
A DVL-Aided Loosely …
Research Overview
Loosely coupled SINS/DVL architectures are widely adopted in autonomous underwater vehicles due to their simplicity and robustness, yet their long-term performance is often limited by attitude estimation errors. This work proposes a DVL-aided loosely coupled inertial navigation …
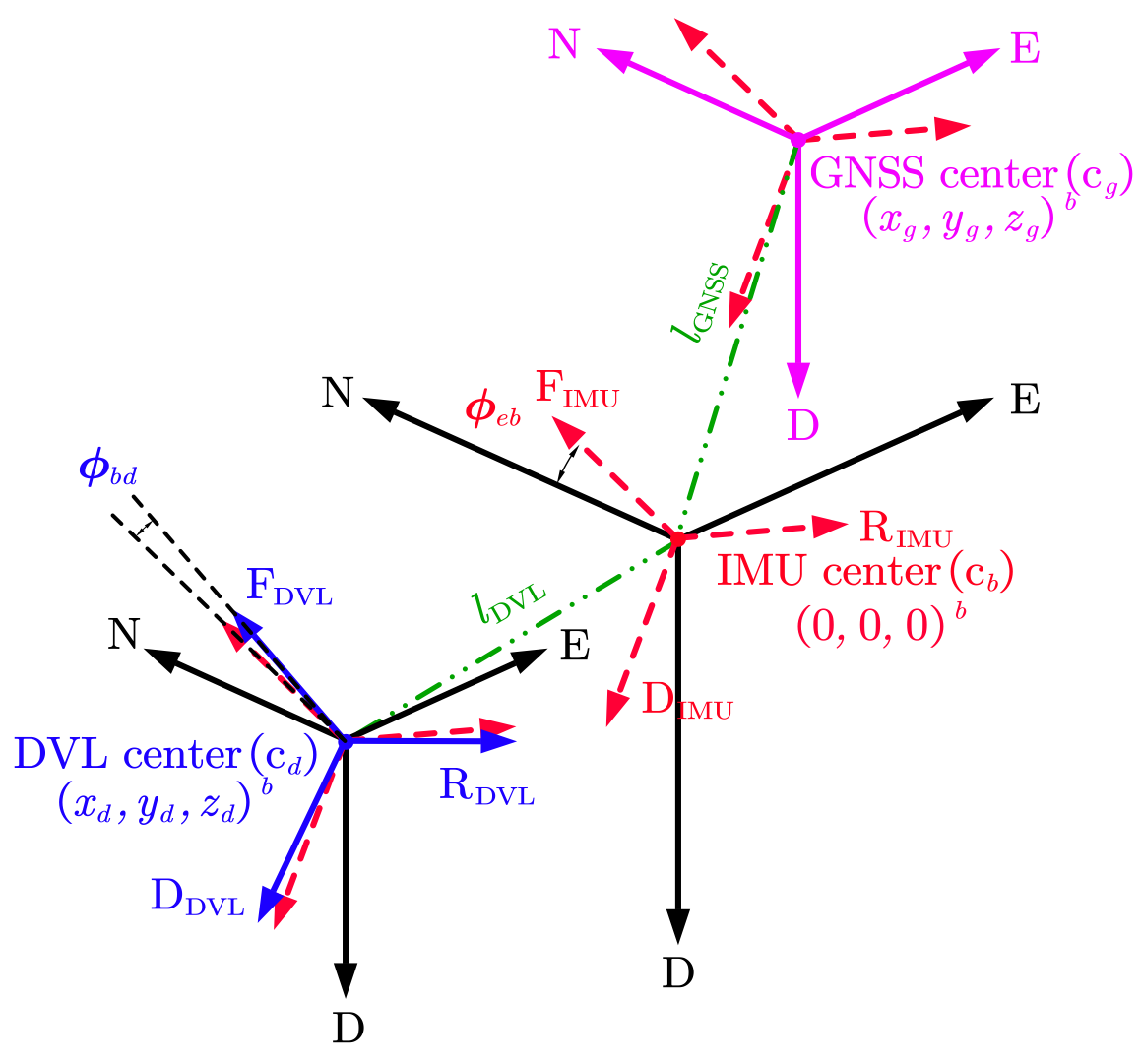
GNSS-aided installation …
Research Overview
This work addresses installation errors of Doppler Velocity Log (DVL) sensors in SINS/DVL integrated navigation for autonomous underwater vehicles (AUVs). It proposes a GNSS-aided strategy to estimate and compensate DVL misalignment and lever-arm errors rather than treating them as …