INS/DVL Integration
GNSS-aided installation …
Research Overview
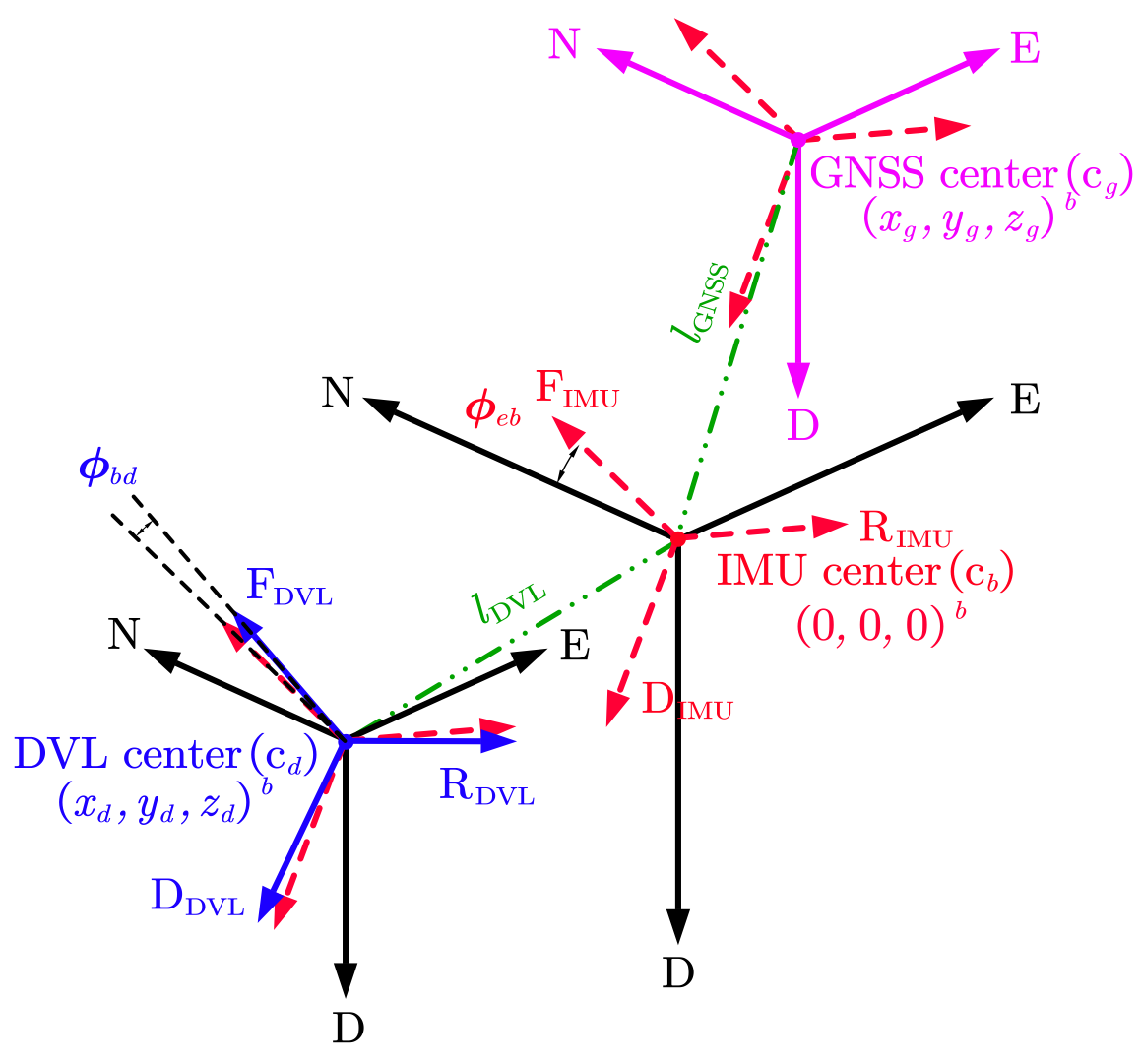
This work addresses installation errors of Doppler Velocity Log (DVL) sensors in SINS/DVL integrated navigation for autonomous underwater vehicles (AUVs). It proposes a GNSS-aided strategy to estimate and compensate DVL misalignment and lever-arm errors rather than treating them as …