Passive Inverted USBL (PiUSBL)
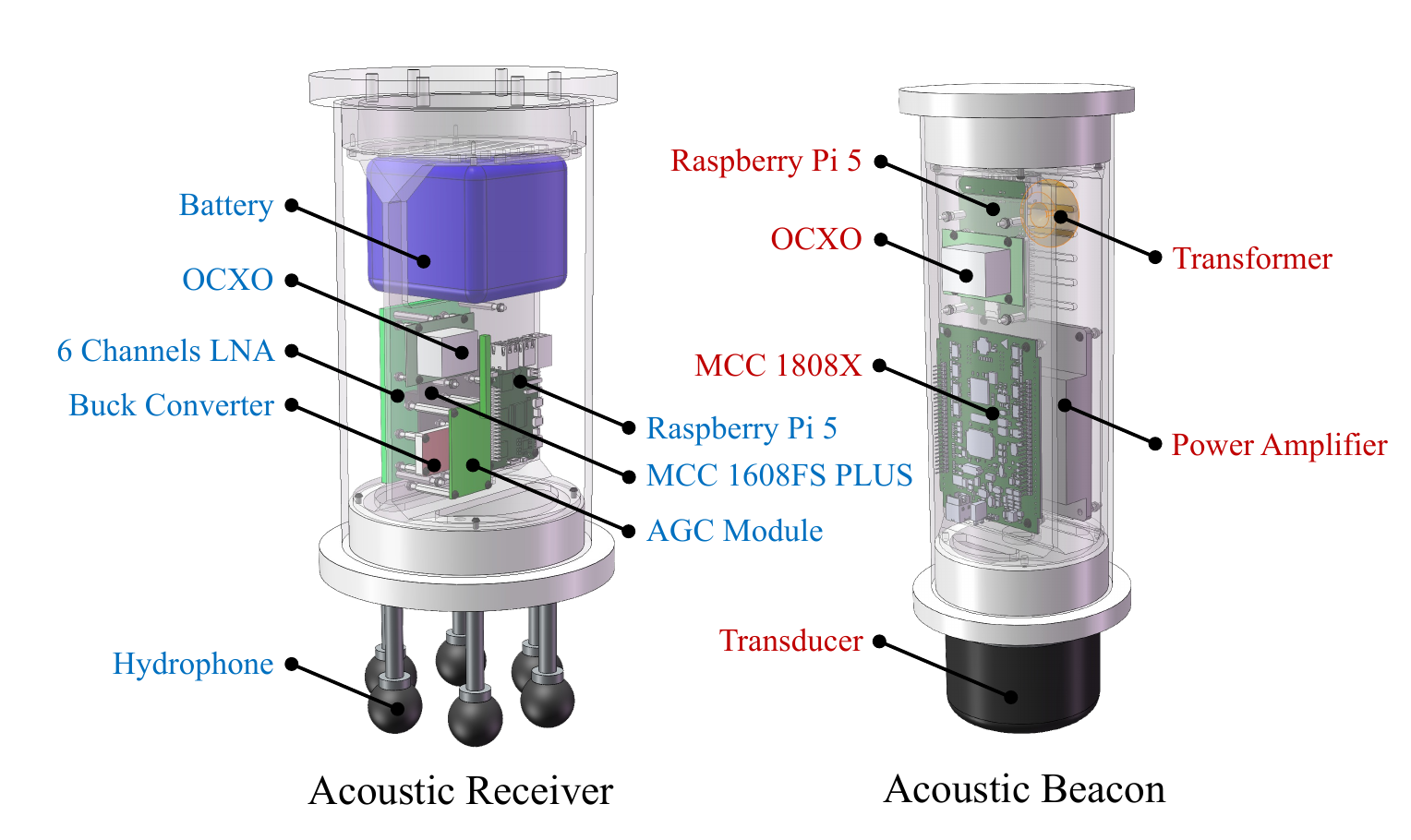
Raspi²USBL: An …
What We Built
Accurate positioning is one of the first problems that appears in underwater robotics, because GNSS signals cannot be used below the water surface. Commercial acoustic positioning systems are useful, but they are often expensive, closed, and difficult to modify for research …
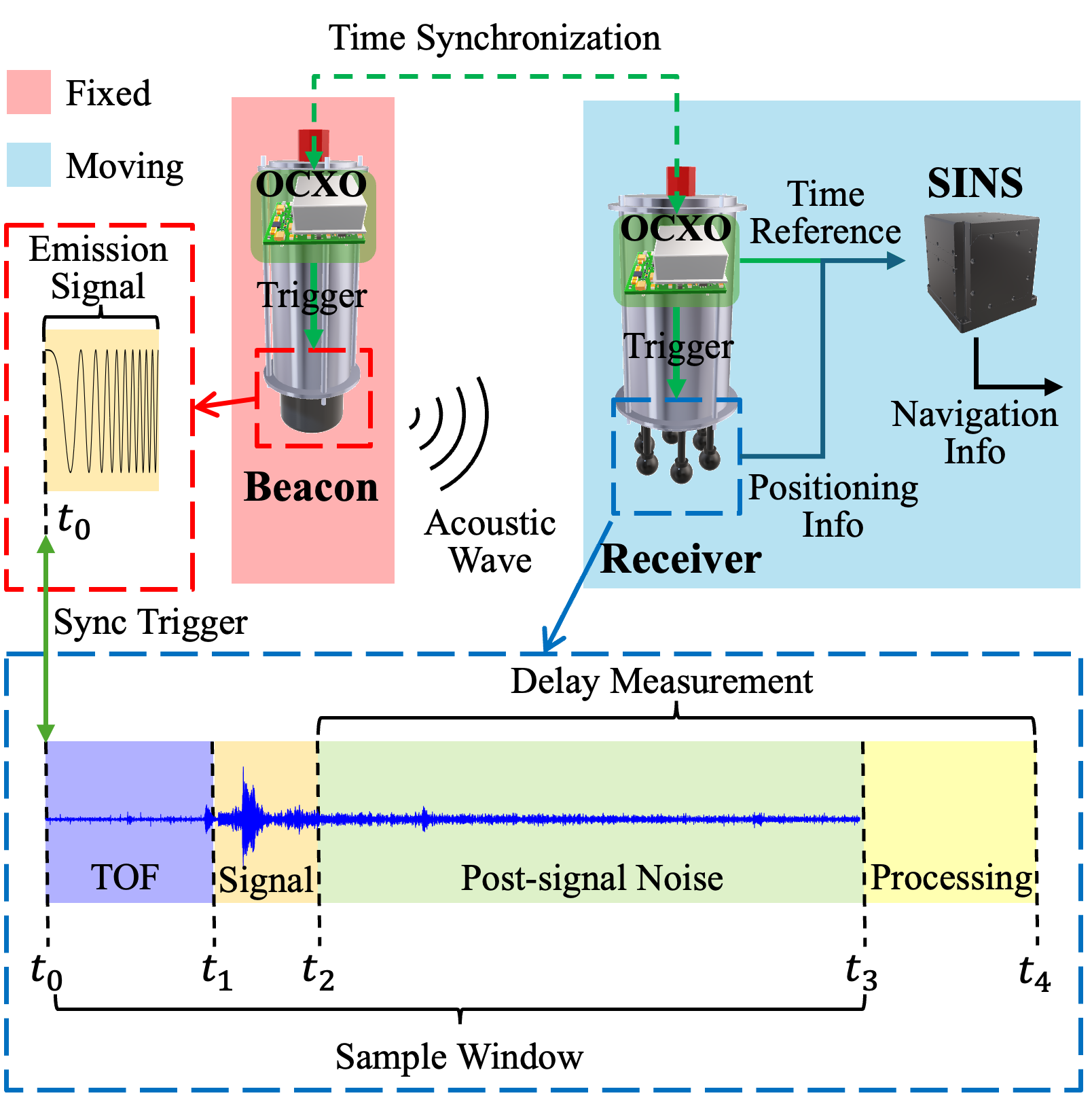
Precise Time Delay …
Research Overview
Time misalignment between acoustic positioning systems and inertial navigation sensors is a critical yet often underappreciated source of error in underwater integrated navigation. This work proposes a tightly coupled SINS/piUSBL/depth gauge navigation framework that explicitly …